12. Implementation
Implementation: Estimation of Action Values
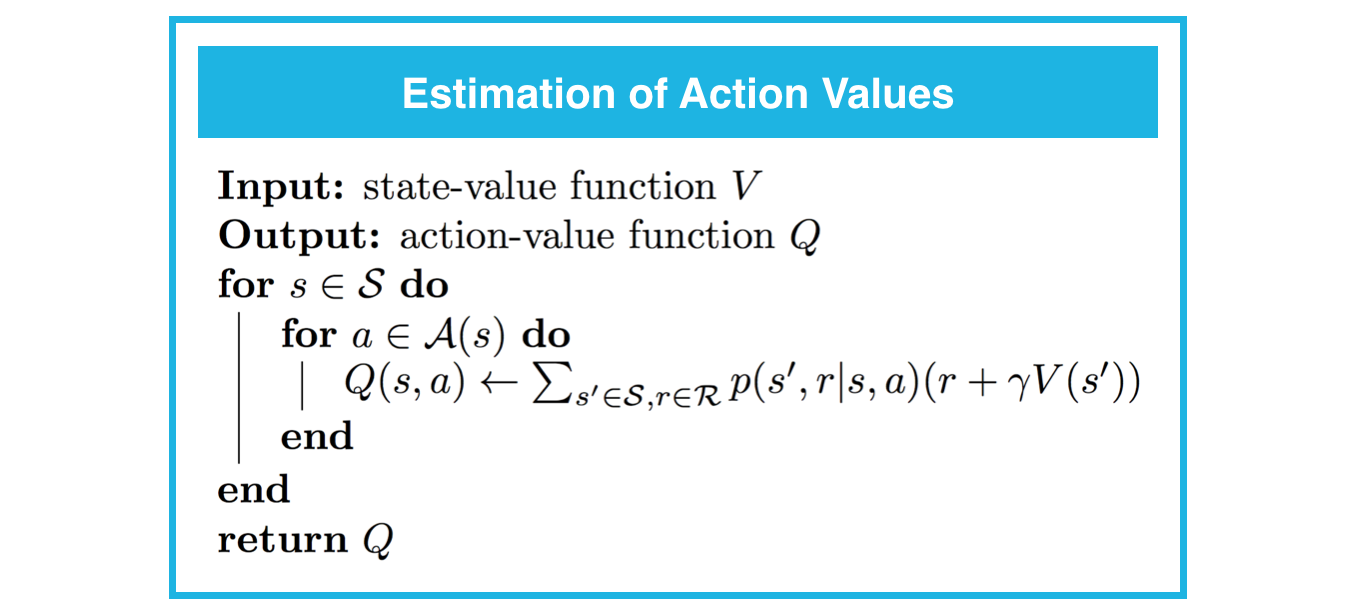
In the next concept, you will write an algorithm that accepts an estimate V of the state-value function v_\pi , along with the one-step dynamics of the MDP p(s',r|s,a) , and returns an estimate Q the action-value function q_\pi .
In order to do this, you will need to use the equation discussed in the previous concept, which uses the one-step dynamics p(s',r|s,a) of the Markov decision process (MDP) to obtain q_\pi from v_\pi . Namely,
q_\pi(s,a) = \sum_{s'\in\mathcal{S}^+, r\in\mathcal{R}}p(s',r|s,a)(r+\gamma v_\pi(s'))
holds for all s\in\mathcal{S} and a\in\mathcal{A}(s) .
You can find the associated pseudocode below.
Please use the next concept to complete
Part 2: Obtain
q_\pi
from
v_\pi
of
Dynamic_Programming.ipynb
. Remember to save your work!
If you'd like to reference the pseudocode while working on the notebook, you are encouraged to open this sheet in a new window.
Feel free to check your solution by looking at the corresponding section in
Dynamic_Programming_Solution.ipynb
.